机器人上岗
本指南聚焦一个目标:让机器人真的能工作。按顺序完成下面 6 步后,你应该拿到一台能联网、能对话、能执行一个核心任务、并可远程接管的机器人。
什么叫“已经上岗”
进入生产前,至少满足这 4 个结果:
- 机器人在平台中在线,并持续同步配置
- 机器人能围绕目标场景正常对话
- 机器人能完成至少一个核心任务
- 运营人员能通过「遥操作」查看状态并在需要时接管
步骤 1:准备机型模板
为什么需要机型? 机型(Robot Model)是机器人硬件的”模板”。它定义了 3D 模型、传感器配置和默认参数。注册新机器人时选择机型即可自动继承这些配置,避免逐台重复设置。
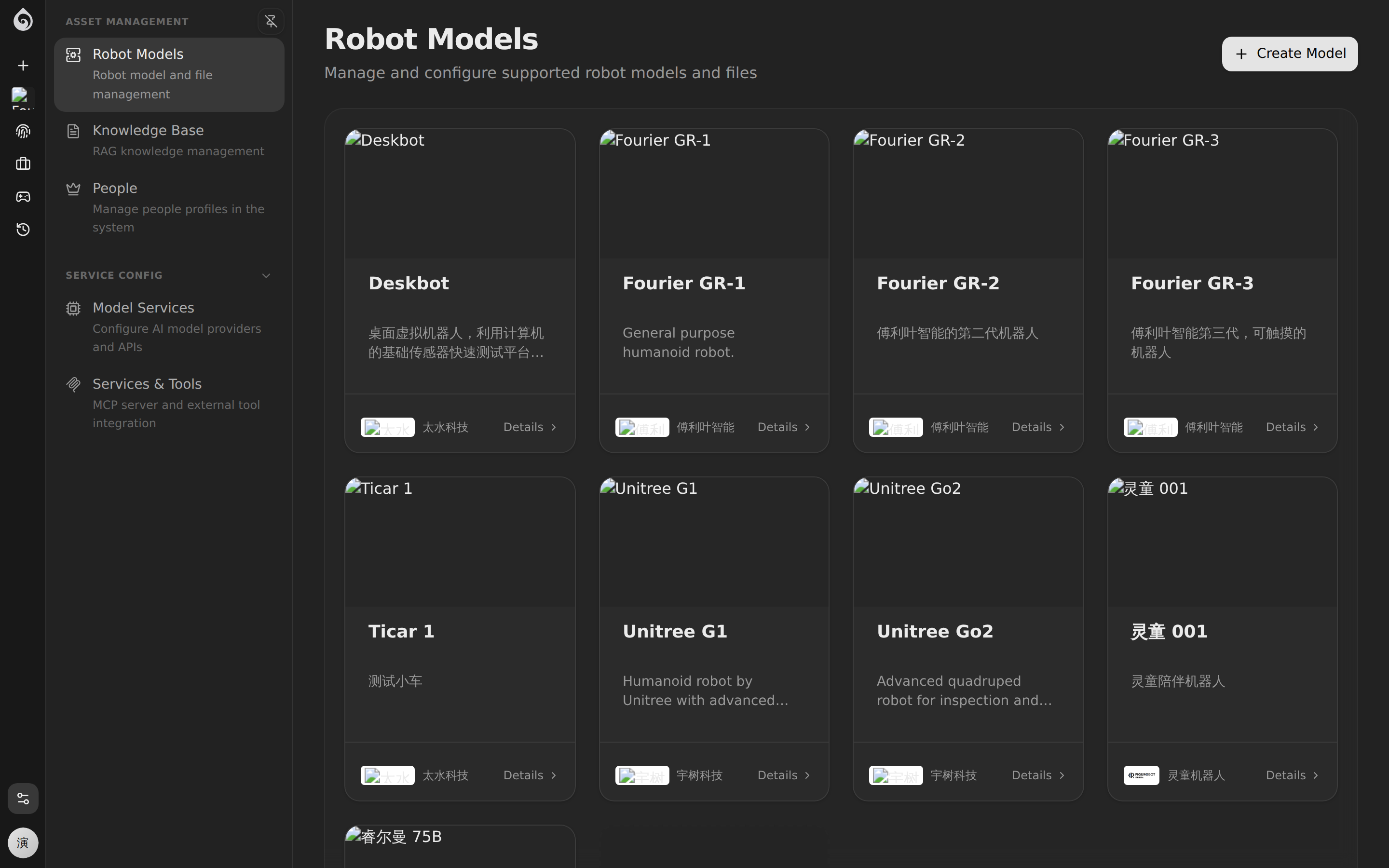
操作方法
- 进入 平台管理 → 机型管理
- 点击 创建机型,填写基本信息:
- 名称 — 如「巡逻犬 Pro」「前台接待 G1」
- 制造商 — 硬件供应商信息
- 描述 — 机型的功能定位与适用场景
- 上传 URDF/MJCF 模型文件(可选但推荐):
- 将
.urdf文件和相关 mesh 资源打包为.zip - 上传后系统自动解析并提供 3D 预览
- 使用诊断功能检查模型完整性
- 将
参考文档:机型管理详解
步骤 2:注册机器人
在仪表盘或机器人列表页创建新设备.
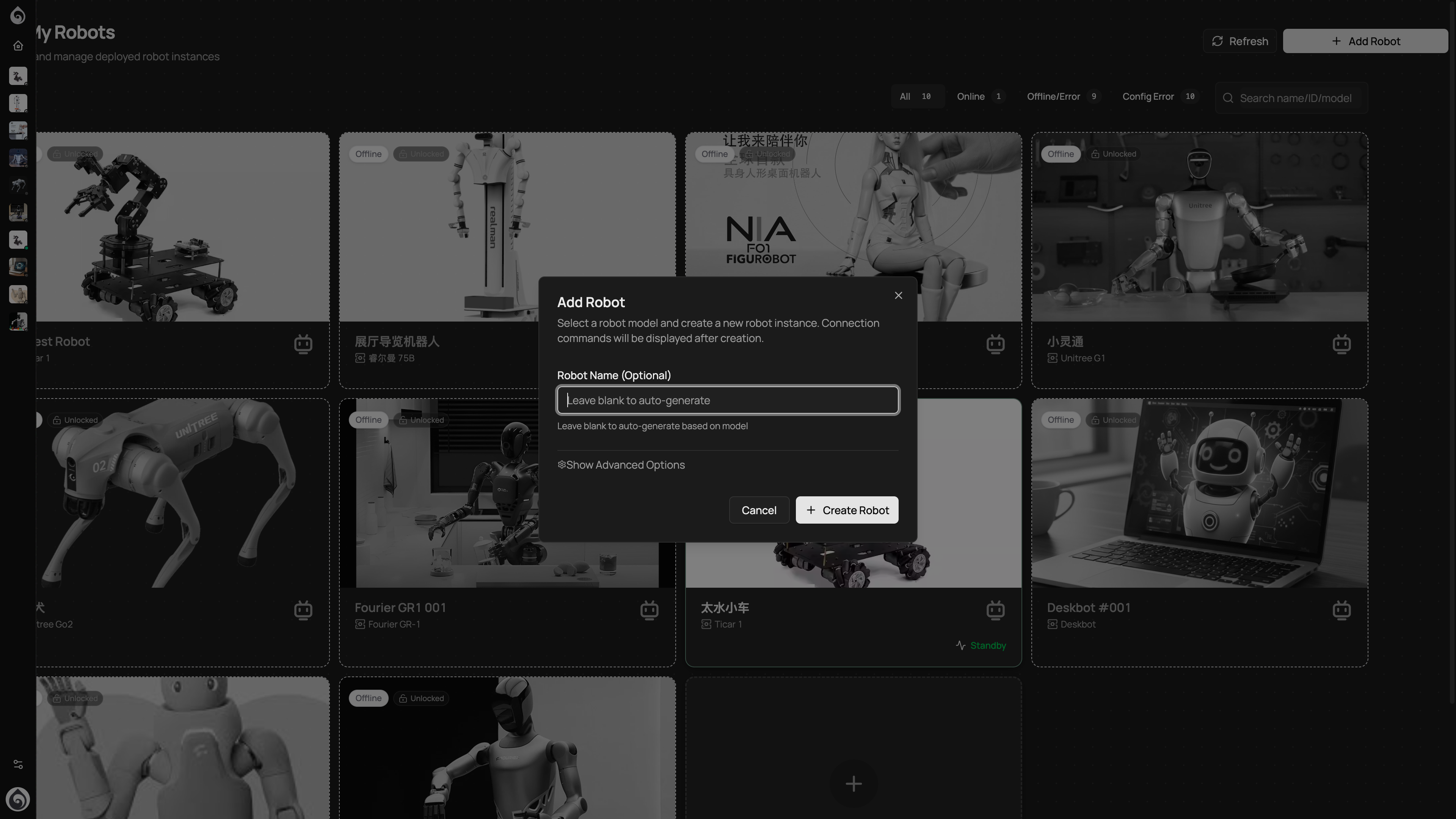
操作方法
- 点击 添加机器人
- 填写设备信息:
- 名称 — 建议遵循「地点 + 角色 + 序号」规范,如「万象城-迎宾-01」
- 选择机型(默认会自动选择第一个可用机型)
- 点击 创建机器人
命名规范建议
好的命名能在舰队规模扩大时大幅降低管理成本:
| 规范 | 示例 | 说明 |
|---|---|---|
| 地点 + 角色 + 序号 | 万象城-迎宾-01 | 适合零售、酒店场景 |
| 项目 + 编号 | Apollo-Proto-03 | 适合研发与测试环境 |
| 楼栋 + 楼层 + 编号 | A3-12F-Security-02 | 适合物业与安防场景 |
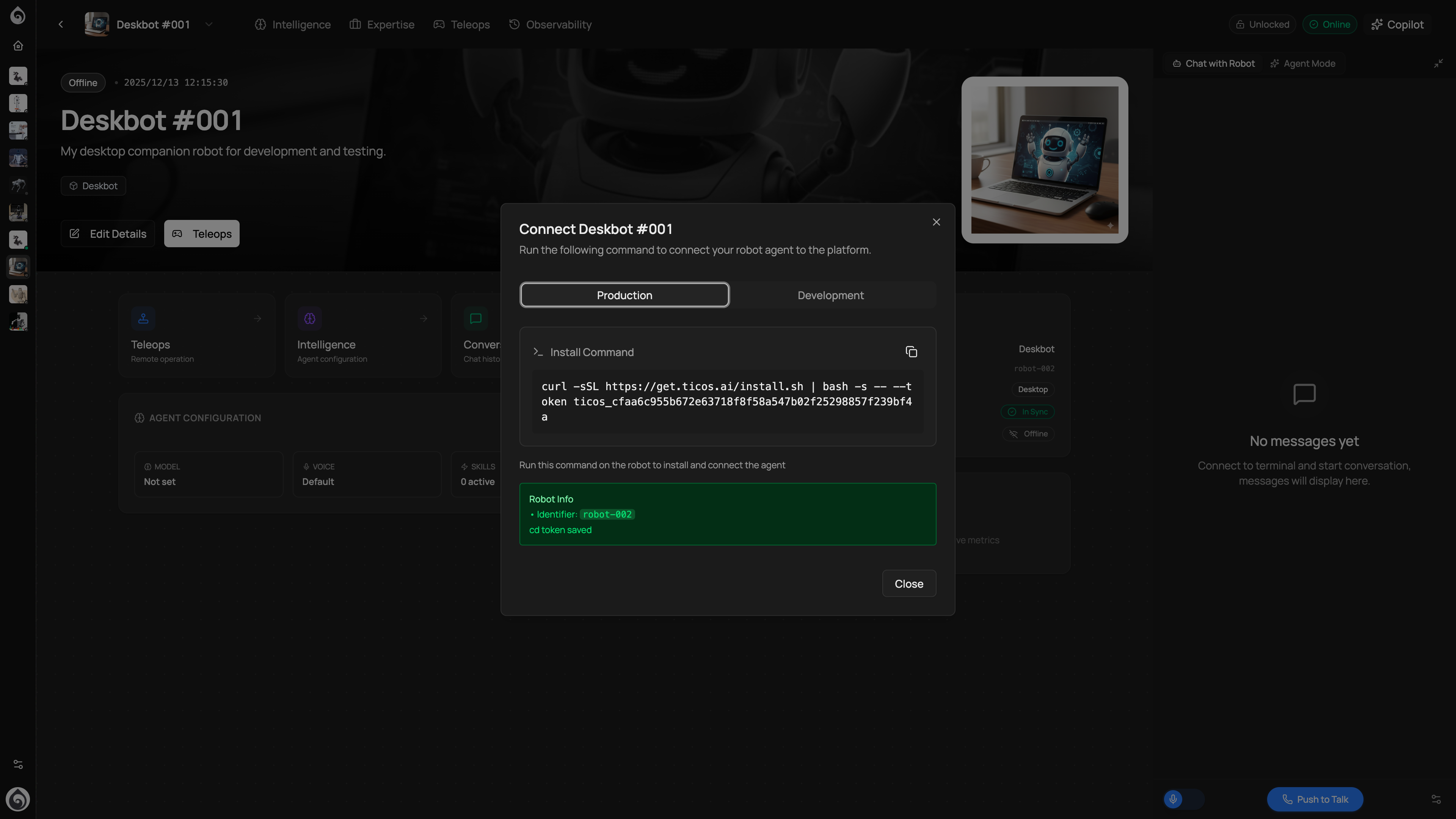
步骤 3:在机器人端安装 Ticos Agent
在云端完成基本注册后,你需要在物理硬件侧安装并启动客户端程序.
Ticos Agent 是部署在机器人设备上的核心接驳程序(开源仓库:tiwater/ticos-agent)。它作为连接物理设备与 Ticos 云端 Server (api.ticos.ai) 的桥梁负责:
- 维持与云端中枢的持久连接,作为统一的数据汇聚点
- 自动拉取最新的机型、智能体与场景配置
- 实时处理本地感知输入并触发物理动作
- 桥接硬件驱动与 Ticos 的远程操控及 Stardust 服务
操作方法
- 登录到机器人的板载计算平台(如 Jetson、树莓派或 x86 工控机)。
- 在 Ticos Web 控制台顶部栏(Header)点击「连接」图标按钮(插头图标),获取该机器人的专属一键安装命令。
- 在机器人终端中运行该安装脚本(形如
curl -sSL https://get.ticos.ai/install.sh | bash -s -- --token <Token>)。 - 等待终端提示连接成功后,返回 Ticos Web 仪表盘,确认该设备状态已变为 在线。
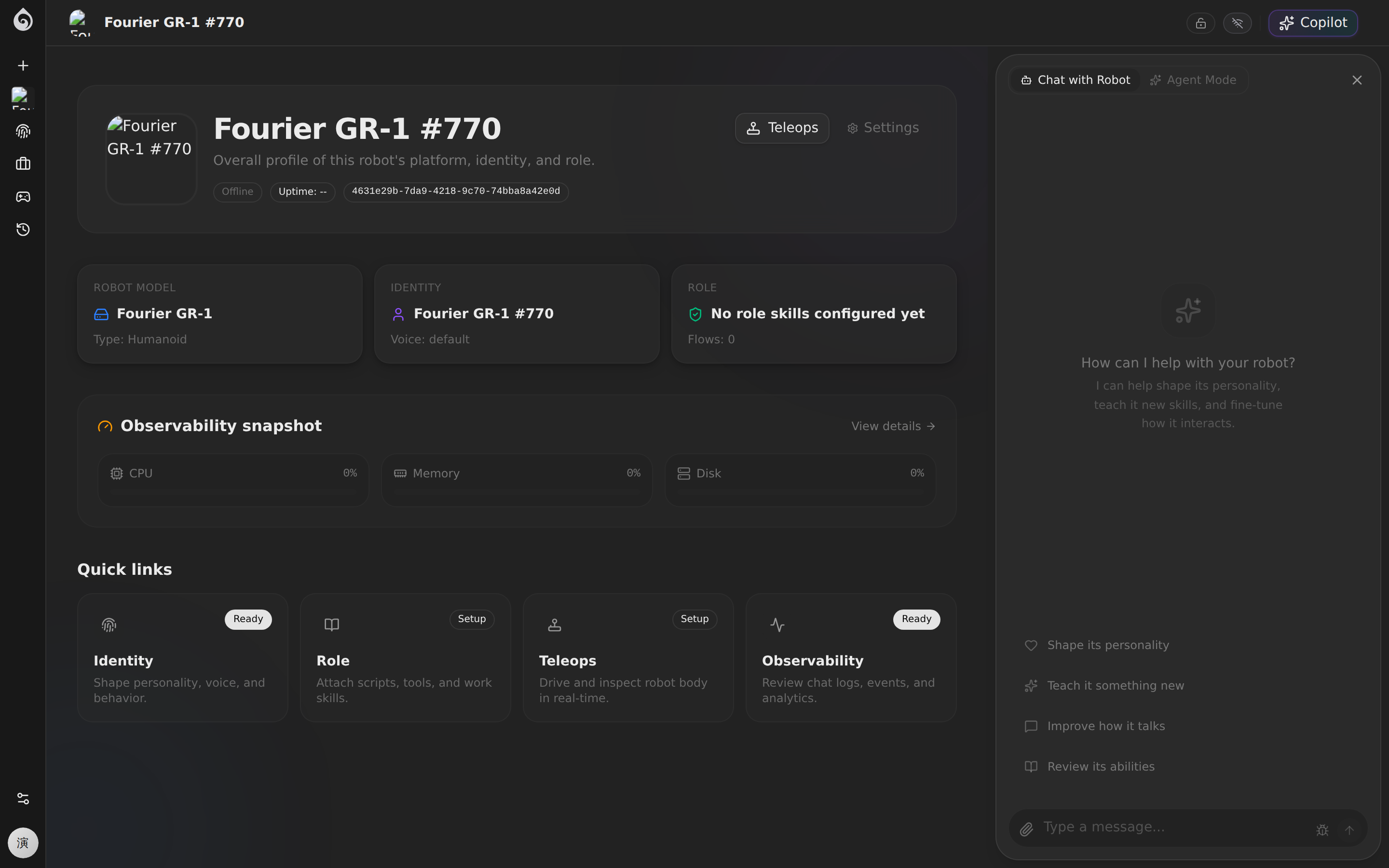
步骤 4:让机器人先会说会答
智能体是机器人的「AI 大脑」。这一阶段不要追求一步到位,先让机器人稳定完成问候、理解问题、给出安全回答这三个基本动作.
最小可用配置
| 配置项 | 优先级 | 说明 |
|---|---|---|
| 模型选择 | 必需 | 选择 LLM(GPT-4o、Claude、DeepSeek、Gemini 等) |
| 个性/提示词 | 必需 | 定义角色定位、语气风格、行为准则与能力边界 |
| 音色 (Voice) | 推荐 | 选择基于 TTS 引擎的回复音色,提升交互自然度 |
| 技能 (Skills) | 推荐 | 通过 MCP 工具模块扩展智能体的感知与操作能力 |
| 知识库 (Knowledge) | 按需 | 上传业务领域文档,通过 RAG 增强回答的专业性 |
继续阅读:让机器人会说会答
步骤 5:教会机器人做一件事
这里的目标不是把所有页面都配置完,而是让机器人在一个真实场景里完成一条闭环。通常至少补齐两类能力:
- 任务知识与流程:回答什么、按什么流程执行
- 场景与导航:去哪里、如何移动、哪些区域可进可出
推荐顺序
- 先进入机器人详情页的「专长」,补齐知识、脚本、角色或流程
- 如果机器人涉及移动,再进入「专长 → 场景」绑定地图与路线
- 配置场景要素:
- 地图 — 环境的 2D/3D 地图数据
- 路线 — 预定义的巡逻或服务路径
- 区域 — 功能区域(充电区、禁入区、服务区等)
继续阅读:
步骤 6:上线验收
将机器人交给运营团队之前,完成一次端到端验收,确保所有链路正常.
验收检查清单
基础连通性
- 机器人在仪表盘中显示为在线
- 健康指标(CPU、内存、网络)无异常告警
远程操控
- 进入「遥操作」,视频流正常显示
- 传感器面板数据正常刷新
- 键盘发送运动指令,机器人正确响应
智能体对话
- 触发一段测试对话,智能体正常回复
- 回复风格符合个性配置(语气、角色)
- 知识库问题能命中预期文档片段(如已配置 RAG)
场景与导航
- 场景地图正确加载(如已配置)
- 导航指令可执行(如适用)
常见问题
| 现象 | 排查方向 |
|---|---|
| 机器人显示离线 | 检查设备网络、标识符是否与平台一致 |
| 遥操作无视频 | 确认媒体服务已配置,检查 WebRTC 通道 |
| 智能体不回复 | 检查模型服务 API Key 是否有效 |
| 对话有幻觉 | 完善系统提示词的能力边界,补充知识库 |
上岗完成
通过以上验收后,机器人即可正式交付运营团队。接下来建议了解: